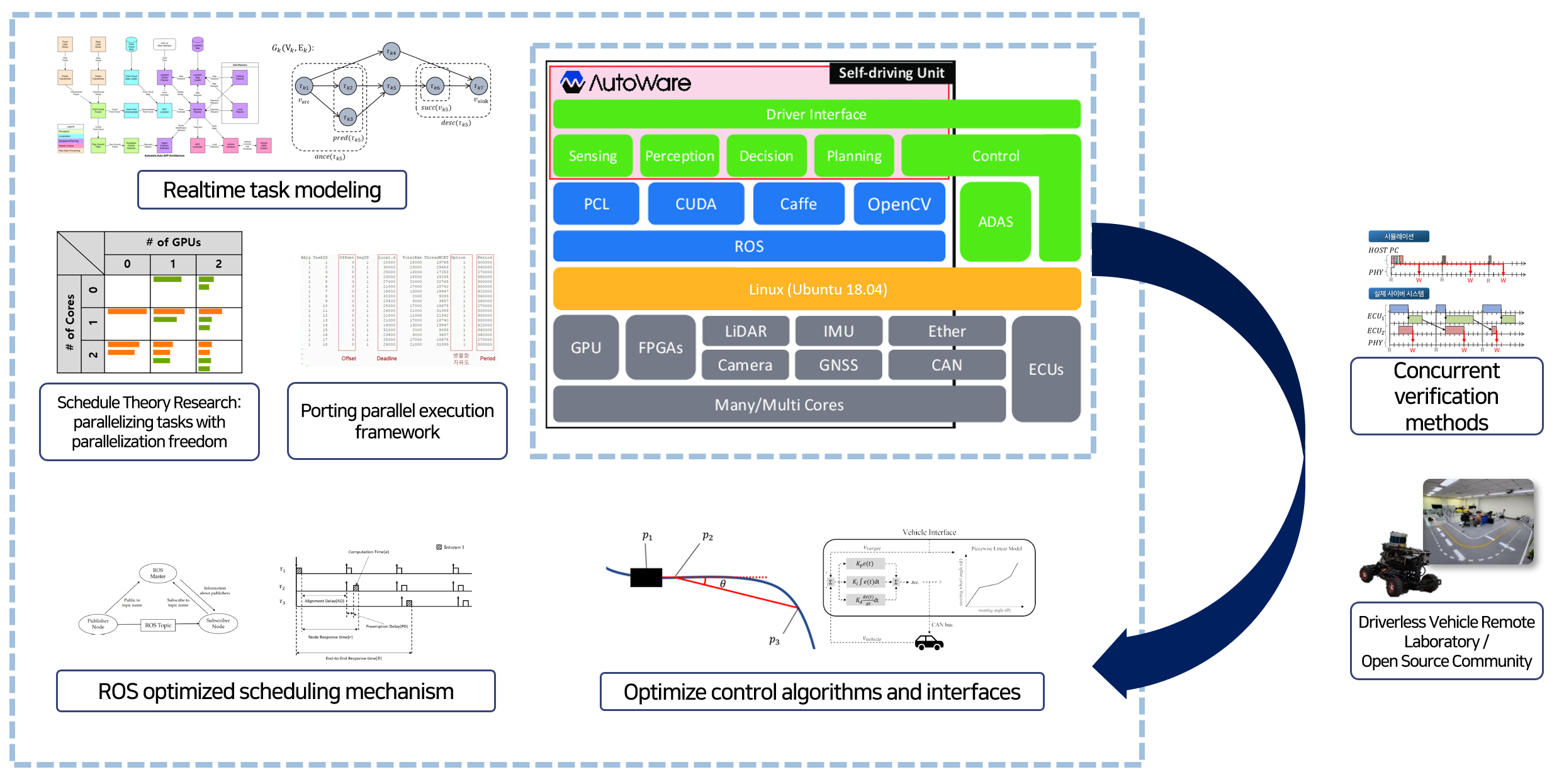
 Multicore/GPGPU HW/SW Platform
Multicore/GPGPU HW/SW Platform
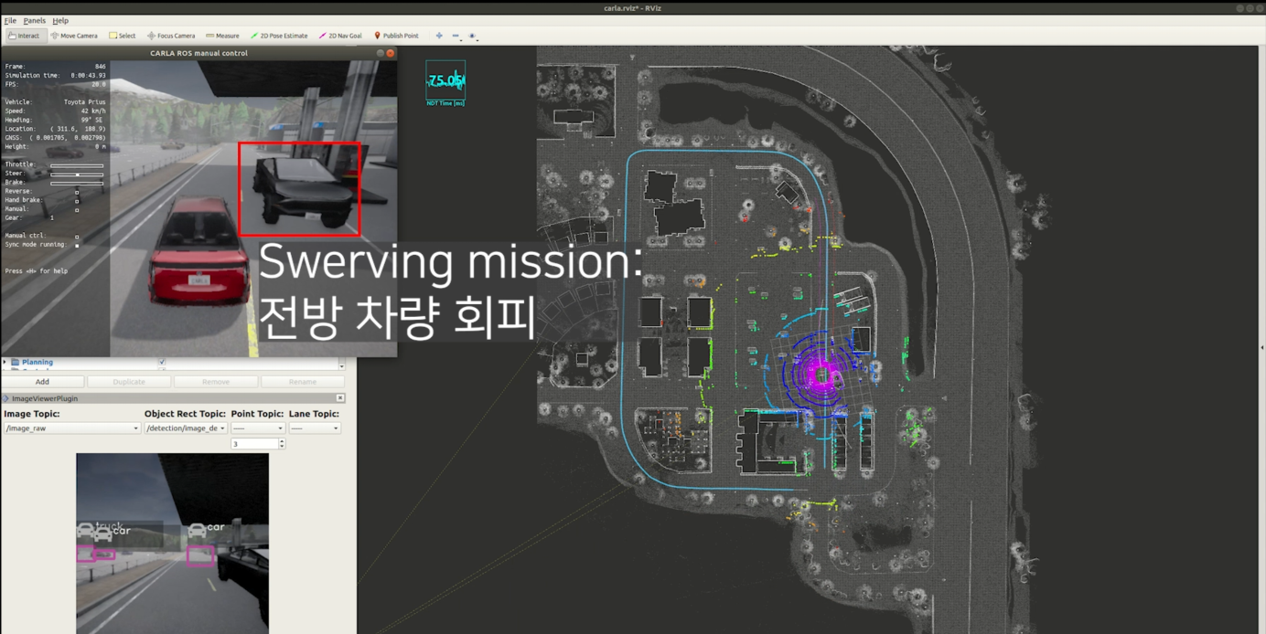 Swerving mission in Carla simulator
Swerving mission in Carla simulator
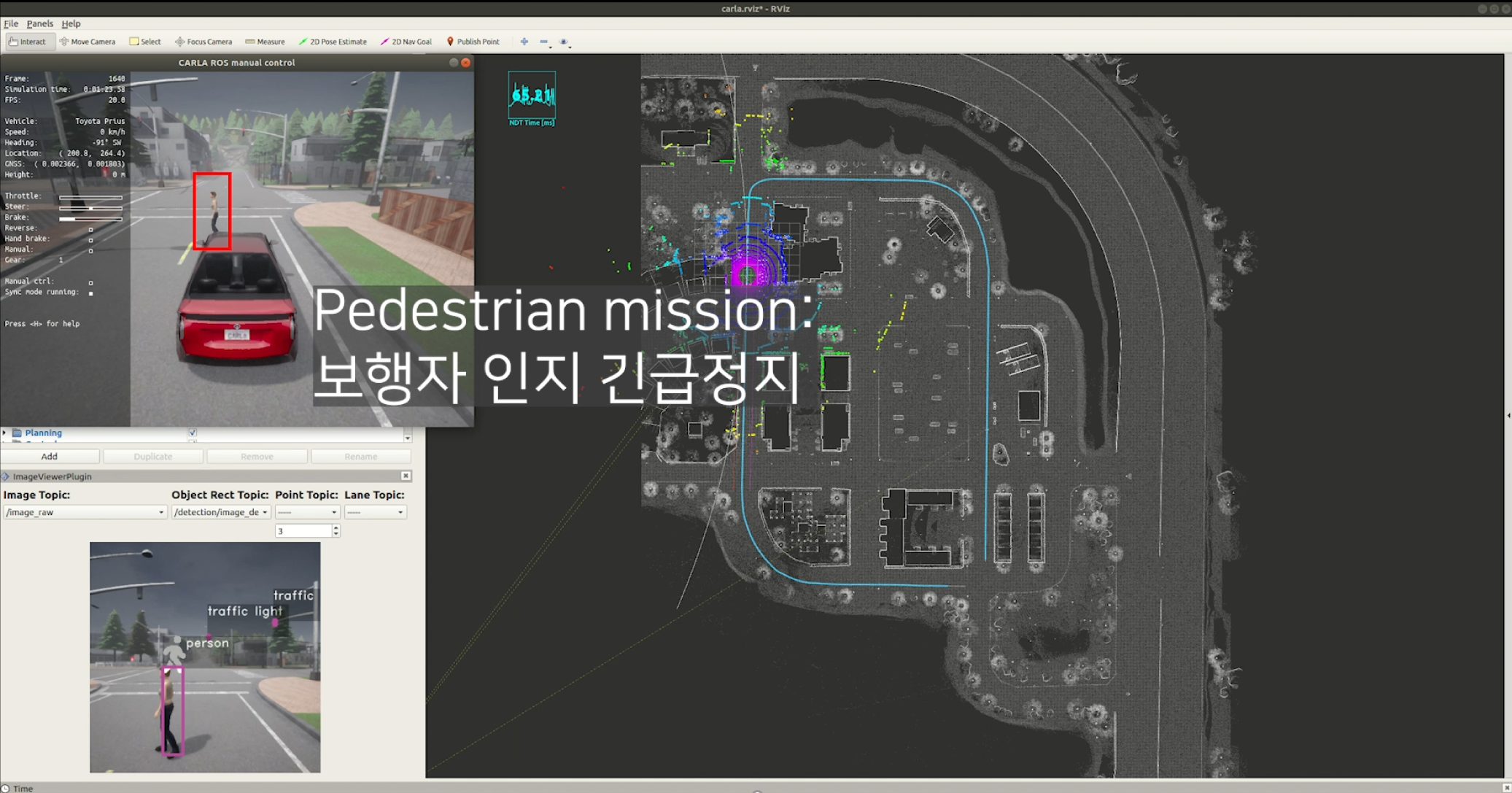 Pedestrian mission in Carla simulator
Pedestrian mission in Carla simulator
 Real vehicle control board setting
Real vehicle control board setting
 Real vehicle in FMTC track
Real vehicle in FMTC track
 Perform autonomous driving missions with real-world vehicles (avoid obstacles, pass through toll booths, make emergency stops after detecting pedestrians, drive around challenging curves)
Perform autonomous driving missions with real-world vehicles (avoid obstacles, pass through toll booths, make emergency stops after detecting pedestrians, drive around challenging curves)
Usage and configuration information for this platform is organized in the following link : Github